原标题:【实时热点】为祖国点赞!“中国神臂”震惊海外,14年研发打破西方垄断达到国际先进水平

17日下午6时许,航天员聂海胜、刘伯明和汤洪波先后进入天和核心舱,标志着中国人首次进入自己的空间站。
进入空间站后,神州十二飞行乘组有必要进行长达6、7个小时的出舱活动,其中一个考验是,三个航天员需要一起配合进行机械臂的使用。这个堪比“变形金刚”的“大力神臂”一亮相便惊艳了众多海外网友,7自由度机械臂让中国空间站如虎添翼。《环球时报》6月14日消息,美国对中国空间站的巨型机械臂表示”震惊”。
去年美国上线了一部以美国太空军建设为主题的政治喜剧《太空部队》(Space Force)。在剧中的平行世界中,被安排成美国“假想敌”的中国航天技术无比强大,从用机械臂剪美国人的卫星电池板、虏获美国宇航猩猩,到在月球抢先设立大型基地,简直无所不能。
更加令人哭笑不得的是,美国军方也跟着一起“做梦”,犯起了被迫害妄想症。今年4月,美国太空司令部司令迪金森(James Dickinson)曾宣称,中国有一款配备了机械臂的卫星,可以“抓走”美国卫星。

它是我国目前智能程度最高、规模与技术难度最大、系统最复杂的空间智能制造系统。中国载人航天工程总设计师周建平18日介绍,机械臂的作用在于空间站组装建造、维护维修、辅助航天员出舱活动等任务,“是中国空间站在轨建造能力水平的重要标志”。
“天和”核心舱由生活控制舱、资源舱、节点舱三个部分构成,在太空为宇航员和科学家提供居住和科研环境,支持人员长期驻留,可以对接货运与载人飞船。
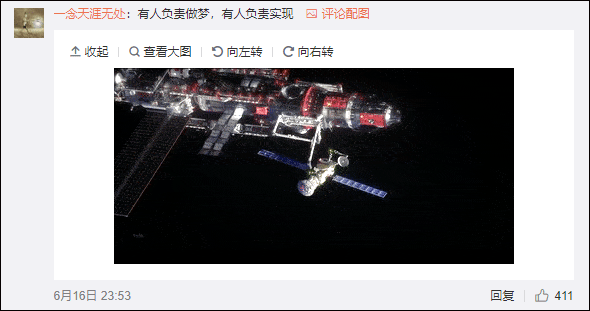
“天和”核心舱外的一对大型机械臂,为我国首个具有七个自由度的机械臂,从而在太空能轻松实现类似人类手臂的运动能力。
据中国电科21所(下称“21所”)4月介绍,该机械臂工作时最长长度可达18米左右、直径约4米左右,可以在太空抓取物体,方便设备的对接、安装、变轨、分离等操作。

从2009年起,21所就开始为航天配套研制载人三期天和舱空间机械臂空间驱动组件、高精度位置传感器等机械臂核心部件以及空间站任务其他相关配套电机。
七个自由度意味着什么?21所专家说,这是对人类手臂的最真实还原。核心舱机械臂通过末端执行器与目标适配器之间的对接与分离,类似于木工常用的榫卯结构,可实现舱体爬行功能,以一种类似蠕虫的运动方式移动到空间站的许多部分,进而在更大范围触达空间站各舱体外表面。
央视新闻报道称,在中国空间站核心舱上的空间站机械臂,是我国目前智能程度最高、规模与技术难度最大、系统最复杂的空间人机一体化智能系统系统。
航天科技集团五院、载人航天工程空间站系统副总指挥王鑫介绍称,空间站机械臂承担着悬停飞行器捕获、辅助航天员舱外活动、舱外货物搬运、舱体状态检查等重要任务,这些都需要机械臂具备精准控制和强大的自由运动能力。
为此,空间站机械臂拥有7处关节、2处末端执行机构,对各位置的信息交互起到连接和转发的功能,对于机械臂关节和末端的灵活性、精准度起到着至关重要的作用。
今年5月,航天科技集团五院推出系列视频《印象空间站》,在第二集“太空炫舞中国臂”中,带大家探索了堪比“变形金刚”的空间站机械臂。
视频介绍,机械臂位于核心舱小柱段,具备舱体爬行功能,并实现舱外状态监视。当机械臂转位实验舱时,可开展空间站建造任务。
此外,机械臂可捕获来访悬停飞行器、转移货运飞船载荷、进行空间站舱表状态检查、辅助航天员出舱活动,并可与实验舱实现机械臂级联组合。
实际我们的祖国为了空间站工程的建造,从2007年开始就全面启动了空间站机械臂的研发工作,而当时国际空间站的“加拿大臂2”型空间站机械臂,已经服役了6年。而更早的美国航天飞机使用的加拿大臂-1型机械臂的研制,更要追溯到上世纪80年代,因此从起点来说,我国和西方有着非常大的差距,而背后是中国和发达国家在在机、电、控、动力学、仿真等各个空间机器人专业方向的巨大差距。
在6月18日播出的《新闻1+1》节目中,中国载人航天工程总设计师周建平接受白岩松专访时表示,这些机械臂最大承载能力25吨,是中国空间站在轨建造能力水平的重要标志。
他说:“机械臂实际上的意思就是一种现代化的手段和工具,可以给航天员提供强大的支撑,使得我们中国空间站的建造技术水平达到国际领先水平。”
例如我国的机械臂长度为10.2米,与问天实验舱机械臂组合后长度能达到15米,仅次于美国的17.6米,远大于欧洲的11.3米和日本的9.9米,而在承载能力上,中国机械臂能承载25吨重量,小于美国的116吨,但远大于欧洲的8吨和日本的7吨。这证明我国已经在高精度伺服控制技术、核心机构部件设计技术、柔性动力学建模与分析技术、目标识别与测量技术等方面都实现了巨大的突破。严格意义上说,美国现在弃用加拿大臂如果自己来研制,也未必能有多高的水平。
而更神奇的舱外爬行技术,实际美国使用的加拿大臂2型机械臂已经具备舱外爬行的功能,但存在两个问题。首先国际空间站是多国联合制造,舱段各不相同,俄罗斯和日本还都使用了欧洲机械臂和日本机械臂,根本也没有预留让美国机械臂爬行的接口,因此美国的机械臂只能在美国制造的舱段上活动,实际并不能够达到爬行的目的,而且也很少进行爬行工作。
另外美国机械臂尽管能够爬行,但是当它移动到新的“锚点”,只能轻松的获得数据连接和视频信号连接,此外就是基本的运转的动力,因此美国的机械臂只能爬行观察情况,但不具备载荷抓握的能力,而我国的机械臂和舱外锚点则进行了进一步的改进,使得机械臂在移动后也具备了载荷抓握的能力。这就从另一方面代表着我国空间站机械臂可工作的范围极大扩展。实际这种更全面的机械臂爬行功能,也是美国在未来探月的星门空间站所要实现的功能。
我国通过空间站机械臂的研制,实现了空间机器人产品的全流程研制,培养了一大批人才,实现了空间机器人系统研制体系的全方位构建。不但能够很好的满足空间站机械臂的使用,而且还应用到月球探测采样机械臂、火星车移动系统等空间机器人系统研制需求,同时这些技术还可满足外骨骼机器人等军民融合方面的应用拓展。

其中一名网友格外的注意到了机械臂的舱体爬行功能。他写道:“机械臂能爬,好有想象力的创造!”

另外,还有人开玩笑地称,“能不能把机械臂当杆”,伸出去给太空舱来个?
